
فلومترهای توربین نوعی دبی سنج سرعت هستند که در انواع کاربردهای صنعتی
– از جمله هوافضا، برودتی و انتقال نگهدارنده
– برای اندازه گیری با دقت بالا کاربرد گسترده ای یافته اند.
دبی سنج توربین که توسط راینهارد وولتمن در قرن هجدهم اختراع شد، برای استفاده در مایعات و گازها قابل اعتماد است. این شامل یک روتور چند پره است که در زوایای قائم نسبت به جریان سیال نصب شده و در جریان سیال بر روی یک یاتاقان آزاد کار معلق است. قطر روتور بسیار کمی کمتر از قطر داخلی محفظه اندازه گیری است و سرعت چرخش آن متناسب با دبی حجمی است.
چرخش توربین را میتوان توسط دستگاههای حالت جامد (رلوکتانس، اندوکتانس، خازنی و پیکآپ با اثر هال) یا توسط حسگرهای مکانیکی (دنده یا درایوهای مغناطیسی) تشخیص داد.
در رلوکتانس پیک آپ، سیم پیچ یک آهنربای دائمی است و پره های توربین از ماده ای ساخته شده اند که جذب آهنربا می شود. با عبور هر تیغه از سیم پیچ، ولتاژی در سیم پیچ ایجاد می شود (شکل 1-A).
در پیکآپ القایی، آهنربای دائمی در روتور تعبیه شده است، یا تیغههای روتور از مواد مغناطیسی دائمی ساخته شدهاند (شکل 1-B). همانطور که هر تیغه از سیم پیچ عبور می کند،
یک پالس ولتاژ تولید می کند. در برخی از طرح ها، تنها یک تیغه مغناطیسی است و پالس نشان دهنده چرخش کامل روتور است.
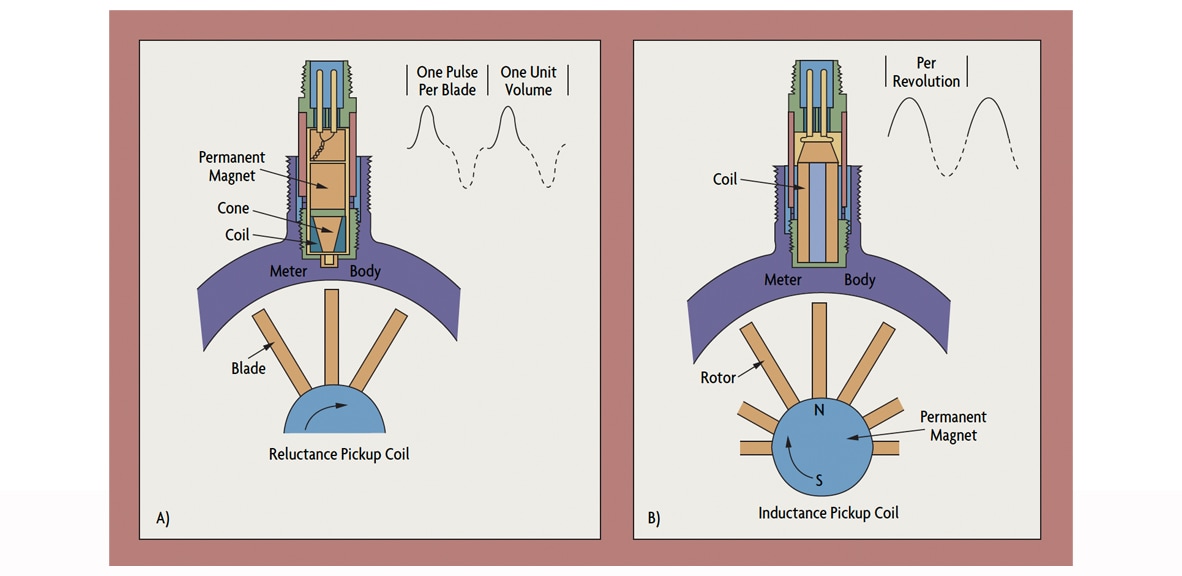
هر پالس حجم مجزای مایع را نشان می دهد. تعداد پالس ها در واحد حجم را ضریب K متر می گویند.
خروجیهای رلوکتانس و سیمپیچهای پیکآپ القایی، امواج سینوسی پیوسته با فرکانس قطار پالس متناسب با نرخ جریان هستند. در نرخ های جریان پایین، خروجی (ارتفاع پالس ولتاژ) ممکن است در حد 20 میلی ولت پیک به پیک باشد. انتقال چنین سیگنال ضعیفی در فواصل طولانی توصیه نمی شود. بنابراین، فاصله بین پیکاپ و لوازم الکترونیکی نمایشگر یا پیش تقویت کننده باید کوتاه باشد. حسگرهای خازنی با تولید یک سیگنال RF که با حرکت پره های روتور دامنه مدوله می شود، موج سینوسی تولید می کنند. به جای کویل های پیک آپ، از ترانزیستورهای اثر هال نیز می توان استفاده کرد. این ترانزیستورها زمانی که در حضور میدان مغناطیسی با قدرت بسیار کم (در حد 25 گاوس) قرار می گیرند، حالت خود را تغییر می دهند. در این دبی سنج های توربین، آهنرباهای بسیار کوچکی در نوک پره های روتور تعبیه شده است. روتورها معمولاً از مواد غیر مغناطیسی مانند پلی پروپیلن، رایتون یا PVDF (Kynar) ساخته می شوند. سیگنال خروجی از یک سنسور اثر هال یک قطار پالس موج مربعی است که در فرکانس متناسب با دبی حجمی است. از آنجایی که سنسورهای اثر هال فاقد کشش مغناطیسی هستند، میتوانند با سرعتهای جریان کمتر (۰.۲ فوت بر ثانیه) نسبت به طرحهای پیکآپ مغناطیسی (۰.۵ تا ۱.۰ فوت در ثانیه) کار کنند. علاوه بر این، سنسور اثر هال سیگنالی با دامنه بالا (معمولاً یک موج مربعی 10.8 ولت) ارائه میکند که اجازه میدهد تا فاصله 3000 فوتی بین سنسور و لوازم الکترونیکی بدون تقویت وجود داشته باشد. در صنعت توزیع آب، فلومترهای توربین با محرک مکانیکی نوع Woltman همچنان استاندارد هستند. این توربین مترها از یک قطار دنده ای برای تبدیل چرخش روتور به چرخش شفت عمودی استفاده می کنند. شفت بین لوله اندازه گیری و بخش رجیستر از طریق یک جعبه پرکننده مکانیکی عبور می کند و یک مجموعه رجیستر مکانیکی چرخ دنده را می چرخاند تا سرعت جریان را نشان دهد و یک شمارنده توتالایزر مکانیکی را فعال کند. اخیراً، صنعت توزیع آب یک درایو مغناطیسی را به عنوان پیشرفتی در مقایسه با مترهای توربین محرک مکانیکی با تعمیر و نگهداری بالا اتخاذ کرده است. این نوع کنتور دارای یک دیسک آب بندی بین محفظه اندازه گیری و رجیستر می باشد. در سمت محفظه اندازه گیری، شفت عمودی به جای چرخ دنده، آهنربا را می چرخاند. در سمت رجیستر، یک آهنربای مخالف برای چرخاندن چرخ دنده نصب شده است. این اجازه می دهد تا یک رجیستر کاملاً مهر و موم شده با مکانیزم محرک مکانیکی استفاده شود .
در ایالات متحده، AWWA استانداردهایی را برای دبی سنج های توربین مورد استفاده در سیستم های توزیع آب تعیین می کند. استاندارد C701 دو کلاس (کلاس I و کلاس II) دبی سنج توربین را فراهم می کند.
توربینسنجهای کلاس I باید بین 98 تا 102 درصد نرخ واقعی در حداکثر دبی را هنگام آزمایش ثبت کنند. توربین مترهای کلاس II باید بین 98.5 تا 101.5 درصد نرخ واقعی را ثبت کنند. هر دو متر کلاس I و کلاس II باید دارای رجیسترهای مکانیکی باشند.
طرح های پیکاپ حالت جامد نسبت به مترهای کلاس I و کلاس AWWA کمتر مستعد سایش مکانیکی هستند.
| سایر مشخصات | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
|
||||||||||
لطفا پیش از ارسال نظر، خلاصه قوانین زیر را مطالعه کنید: فارسی بنویسید و از کیبورد فارسی استفاده کنید. بهتر است از فضای خالی (Space) بیشازحدِ معمول، شکلک یا ایموجی استفاده نکنید و از کشیدن حروف یا کلمات با صفحهکلید بپرهیزید. نظرات خود را براساس تجربه و استفادهی عملی و با دقت به نکات فنی ارسال کنید؛ بدون تعصب به محصول خاص، مزایا و معایب را بازگو کنید و بهتر است از ارسال نظرات چندکلمهای خودداری کنید. بهتر است در نظرات خود از تمرکز روی عناصر متغیر مثل قیمت، پرهیز کنید. به کاربران و سایر اشخاص احترام بگذارید. پیامهایی که شامل محتوای توهینآمیز و کلمات نامناسب باشند، حذف میشوند.
برای ثبت پرسش، لازم است ابتدا وارد حساب کاربری خود شوید





 شناسه محصـول
شناسه محصـول
دیدگاهها0
هیچ دیدگاهی برای این محصول نوشته نشده است.